单机模型并行最佳实践
原文:https://pytorch.org/tutorials/intermediate/model_parallel_tutorial.html
作者 :Shen Li
模型并行在分布式训练技术中被广泛使用。 先前的帖子已经解释了如何使用DataParallel模型并行 解决该问题,与DataParallel相比,该模型将单个模型拆分到不同的 GPU 上,而不是在每个 GPU 上复制整个模型(具体来说, 假设模型m包含 10 层:使用DataParallel时,每个 GPU 都具有这 10 层中的每一个的副本,而当在两个 GPU 上并行使用模型时,每个 GPU 可以承载 5 层。
模型并行化的高级思想是将模型的不同子网放置在不同的设备上,并相应地实现forward方法以在设备之间移动中间输出。 由于模型的一部分仅在任何单个设备上运行,因此一组设备可以共同为更大的模型服务。 在本文中,我们将不会尝试构建庞大的模型并将其压缩到有限数量的 GPU 中。 取而代之的是,本文着重展示并行模型的思想。 读者可以将这些想法应用到实际应用中。
注意
对于模型跨越多个服务器的分布式模型并行训练,请参考分布式 RPC 框架入门 ,以获取示例和详细信息。
基本用法 让我们从包含两个线性层的玩具模型开始。 要在两个 GPU 上运行该模型,只需将每个线性层放置在不同的 GPU 上,然后移动输入和中间输出以匹配层设备。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 import torchimport torch.nn as nnimport torch.optim as optimclass ToyModel (nn.Module): def __init__ (self ): super (ToyModel, self ).__init__() self .net1 = torch.nn.Linear(10 , 10 ).to('cuda:0' ) self .relu = torch.nn.ReLU() self .net2 = torch.nn.Linear(10 , 5 ).to('cuda:1' ) def forward (self, x ): x = self .relu(self .net1(x.to('cuda:0' ))) return self .net2(x.to('cuda:1' ))
请注意,除了五个to(device)调用将线性层和张量放置在适当的设备上之外,上述ToyModel看起来非常类似于在单个 GPU 上实现它的方式。 那是模型中唯一需要更改的地方。 backward()和torch.optim将自动处理梯度,就像模型在一个 GPU 上一样。 调用损失函数时,只需确保标签与输出位于同一设备上。
1 2 3 4 5 6 7 8 9 10 model = ToyModel() loss_fn = nn.MSELoss() optimizer = optim.SGD(model.parameters(), lr=0.001 ) optimizer.zero_grad() outputs = model(torch.randn(20 , 10 )) labels = torch.randn(20 , 5 ).to('cuda:1' ) loss_fn(outputs, labels).backward() optimizer.step()
将模型并行应用于现有模块 只需进行几行更改,就可以在多个 GPU 上运行现有的单 GPU 模块。 以下代码显示了如何将torchvision.models.resnet50()分解为两个 GPU。 这个想法是继承现有的ResNet模块,并在构建过程中将层拆分为两个 GPU。 然后,通过相应地移动中间输出,覆盖forward方法来缝合两个子网。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 from torchvision.models.resnet import ResNet, Bottlenecknum_classes = 1000 class ModelParallelResNet50 (ResNet ): def __init__ (self, *args, **kwargs ): super (ModelParallelResNet50, self ).__init__( Bottleneck, [3 , 4 , 6 , 3 ], num_classes=num_classes, *args, **kwargs) self .seq1 = nn.Sequential( self .conv1, self .bn1, self .relu, self .maxpool, self .layer1, self .layer2 ).to('cuda:0' ) self .seq2 = nn.Sequential( self .layer3, self .layer4, self .avgpool, ).to('cuda:1' ) self .fc.to('cuda:1' ) def forward (self, x ): x = self .seq2(self .seq1(x).to('cuda:1' )) return self .fc(x.view(x.size(0 ), -1 ))
对于模型太大而无法放入单个 GPU 的情况,上述实现解决了该问题。 但是,您可能已经注意到,如果模型合适,它将比在单个 GPU 上运行它要慢。 这是因为在任何时间点,两个 GPU 中只有一个在工作,而另一个在那儿什么也没做。 由于中间输出需要在layer2和layer3之间从cuda:0复制到cuda:1,因此性能进一步恶化。
让我们进行实验以更定量地了解执行时间。 在此实验中,我们通过运行随机输入和标签来训练ModelParallelResNet50和现有的torchvision.models.resnet50()。 训练后,模型将不会产生任何有用的预测,但是我们可以对执行时间有一个合理的了解。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 import torchvision.models as modelsnum_batches = 3 batch_size = 120 image_w = 128 image_h = 128 def train (model ): model.train(True ) loss_fn = nn.MSELoss() optimizer = optim.SGD(model.parameters(), lr=0.001 ) one_hot_indices = torch.LongTensor(batch_size) \ .random_(0 , num_classes) \ .view(batch_size, 1 ) for _ in range (num_batches): inputs = torch.randn(batch_size, 3 , image_w, image_h) labels = torch.zeros(batch_size, num_classes) \ .scatter_(1 , one_hot_indices, 1 ) optimizer.zero_grad() outputs = model(inputs.to('cuda:0' )) labels = labels.to(outputs.device) loss_fn(outputs, labels).backward() optimizer.step()
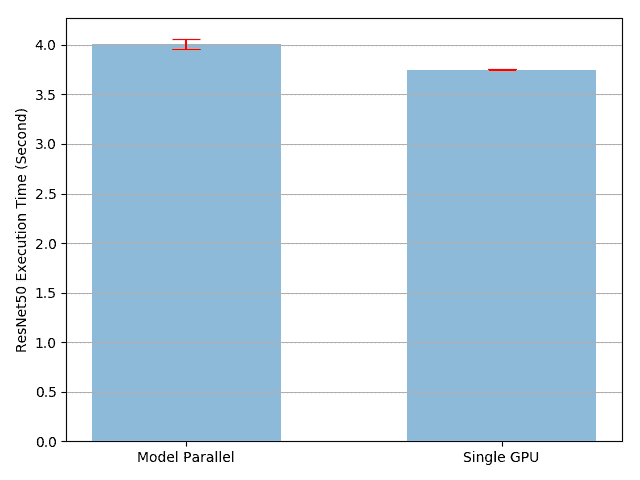
上面的train(model)方法使用nn.MSELoss作为损失函数,并使用optim.SGD作为优化器。 它模拟了对128 X 128图像的训练,这些图像分为 3 批,每批包含 120 张图像。 然后,我们使用timeit来运行train(model)方法 10 次,并绘制带有标准差的执行时间。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 import matplotlib.pyplot as pltplt.switch_backend('Agg' ) import numpy as npimport timeitnum_repeat = 10 stmt = "train(model)" setup = "model = ModelParallelResNet50()" mp_run_times = timeit.repeat( stmt, setup, number=1 , repeat=num_repeat, globals =globals ()) mp_mean, mp_std = np.mean(mp_run_times), np.std(mp_run_times) setup = "import torchvision.models as models;" + \ "model = models.resnet50(num_classes=num_classes).to('cuda:0')" rn_run_times = timeit.repeat( stmt, setup, number=1 , repeat=num_repeat, globals =globals ()) rn_mean, rn_std = np.mean(rn_run_times), np.std(rn_run_times) def plot (means, stds, labels, fig_name ): fig, ax = plt.subplots() ax.bar(np.arange(len (means)), means, yerr=stds, align='center' , alpha=0.5 , ecolor='red' , capsize=10 , width=0.6 ) ax.set_ylabel('ResNet50 Execution Time (Second)' ) ax.set_xticks(np.arange(len (means))) ax.set_xticklabels(labels) ax.yaxis.grid(True ) plt.tight_layout() plt.savefig(fig_name) plt.close(fig) plot([mp_mean, rn_mean], [mp_std, rn_std], ['Model Parallel' , 'Single GPU' ], 'mp_vs_rn.png' )
结果表明,模型并行实现的执行时间比现有的单 GPU 实现长4.02/3.75-1=7%。 因此,我们可以得出结论,在 GPU 之间来回复制张量大约有 7% 的开销。 有待改进的地方,因为我们知道两个 GPU 之一在整个执行过程中处于空闲状态。 一种选择是将每个批量进一步划分为拆分流水线,以便当一个拆分到达第二子网时,可以将下一个拆分馈入第一子网。 这样,两个连续的拆分可以在两个 GPU 上同时运行。
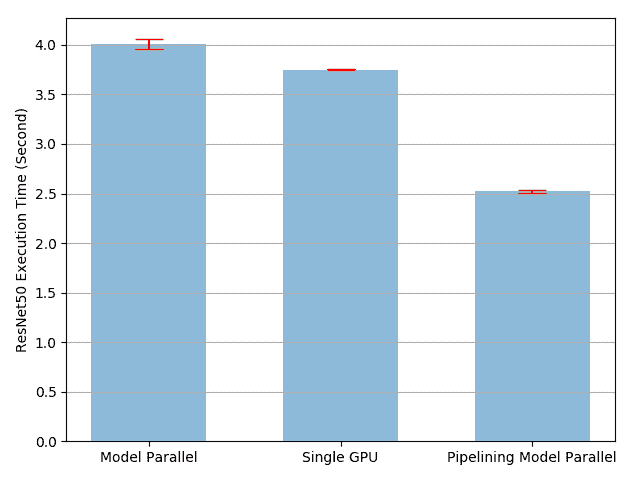
通过流水线输入加快速度 在以下实验中,我们将每个 120 图像批量进一步分为 20 图像分割。 当 PyTorch 异步启动 CUDA 操作时,该实现无需生成多个线程即可实现并发。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 class PipelineParallelResNet50 (ModelParallelResNet50 ): def __init__ (self, split_size=20 , *args, **kwargs ): super (PipelineParallelResNet50, self ).__init__(*args, **kwargs) self .split_size = split_size def forward (self, x ): splits = iter (x.split(self .split_size, dim=0 )) s_next = next (splits) s_prev = self .seq1(s_next).to('cuda:1' ) ret = [] for s_next in splits: s_prev = self .seq2(s_prev) ret.append(self .fc(s_prev.view(s_prev.size(0 ), -1 ))) s_prev = self .seq1(s_next).to('cuda:1' ) s_prev = self .seq2(s_prev) ret.append(self .fc(s_prev.view(s_prev.size(0 ), -1 ))) return torch.cat(ret) setup = "model = PipelineParallelResNet50()" pp_run_times = timeit.repeat( stmt, setup, number=1 , repeat=num_repeat, globals =globals ()) pp_mean, pp_std = np.mean(pp_run_times), np.std(pp_run_times) plot([mp_mean, rn_mean, pp_mean], [mp_std, rn_std, pp_std], ['Model Parallel' , 'Single GPU' , 'Pipelining Model Parallel' ], 'mp_vs_rn_vs_pp.png' )
请注意,设备到设备的张量复制操作在源设备和目标设备上的当前流上同步。 如果创建多个流,则必须确保复制操作正确同步。 在完成复制操作之前写入源张量或读取/写入目标张量可能导致不确定的行为。 上面的实现仅在源设备和目标设备上都使用默认流,因此不必强制执行其他同步。
实验结果表明,对并行 ResNet50 进行建模的流水线输入可大致加快3.75/2.51-1=49%的速度,加快训练过程。 距离理想的 100% 加速仍然相去甚远。 由于我们在管道并行实现中引入了新参数split_sizes,因此尚不清楚新参数如何影响整体训练时间。 直观地讲,使用较小的split_size会导致许多小的 CUDA 内核启动,而使用较大的split_size会导致在第一次和最后一次拆分期间出现较长的空闲时间。 两者都不是最优的。 对于此特定实验,可能会有最佳的split_size配置。 让我们尝试通过使用几个不同的split_size值进行实验来找到它。
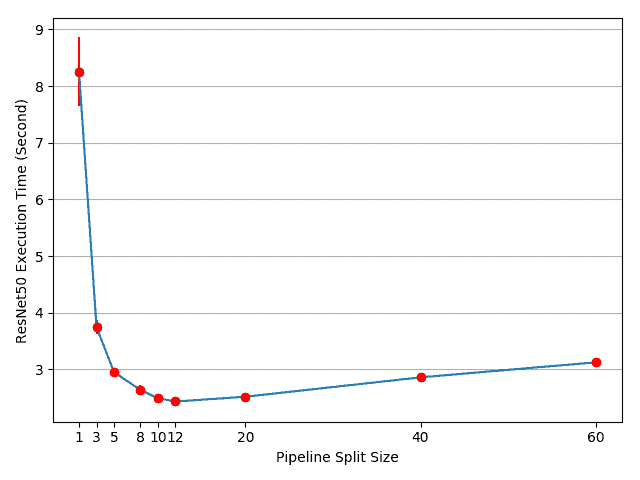
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 means = [] stds = [] split_sizes = [1 , 3 , 5 , 8 , 10 , 12 , 20 , 40 , 60 ] for split_size in split_sizes: setup = "model = PipelineParallelResNet50(split_size=%d)" % split_size pp_run_times = timeit.repeat( stmt, setup, number=1 , repeat=num_repeat, globals =globals ()) means.append(np.mean(pp_run_times)) stds.append(np.std(pp_run_times)) fig, ax = plt.subplots() ax.plot(split_sizes, means) ax.errorbar(split_sizes, means, yerr=stds, ecolor='red' , fmt='ro' ) ax.set_ylabel('ResNet50 Execution Time (Second)' ) ax.set_xlabel('Pipeline Split Size' ) ax.set_xticks(split_sizes) ax.yaxis.grid(True ) plt.tight_layout() plt.savefig("split_size_tradeoff.png" ) plt.close(fig)
结果表明,将split_size设置为 12 可获得最快的训练速度,从而导致3.75/2.43-1=54%加速。 仍有机会进一步加快训练过程。 例如,对cuda:0的所有操作都放在其默认流上。 这意味着下一个拆分的计算不能与上一个拆分的复制操作重叠。 但是,由于上一个和下一个分割是不同的张量,因此将一个计算与另一个副本重叠是没有问题的。 实现需要在两个 GPU 上使用多个流,并且不同的子网结构需要不同的流管理策略。 由于没有通用的多流解决方案适用于所有模型并行用例,因此在本教程中将不再讨论。
注意 :
这篇文章显示了几个性能指标。 当您在自己的计算机上运行相同的代码时,您可能会看到不同的数字,因为结果取决于底层的硬件和软件。 为了使您的环境获得最佳性能,一种正确的方法是首先生成曲线以找出最佳分割尺寸,然后将该分割尺寸用于管道输入。
脚本的总运行时间 :(6 分钟 20.515 秒)
下载 Python 源码:model_parallel_tutorial.py
下载 Jupyter 笔记本:model_parallel_tutorial.ipynb
由 Sphinx 画廊 生成的画廊