4.1 层次结构与装入链接
1 存储器的层次结构
存储器的层次结构
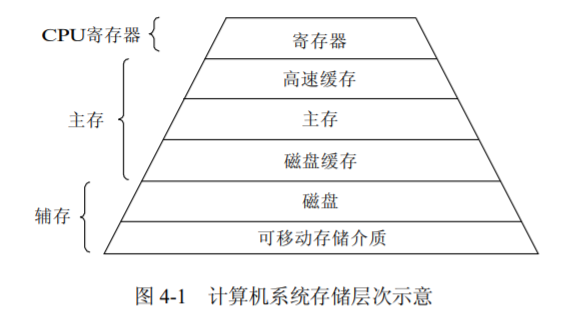
寄存器
- 寄存器访问速度最快,完全能与 CPU 协调工作。寄存器用于加速存储器的访问速度,如用寄存器存放操作数,或用作地址寄存器加快地址转换速度等。
高速缓存
- Cache是介于CPU和主存储器间的高速小容量存储器,由静态存储芯片SRAM组成,容量较小但比主存DRAM技术更加昂贵而快速,接近于CPU的速度
- CPU往往需要重复读取同样的数据库,Cache的引入与缓存容量的增大,可以大幅提升CPU内部读取数据的命中率,从而提高系统性能
- 分级:由于CPU芯片面积和成本,Cache很小。根据成本控制,划分L1,L2,L3三级。
- L1 Cache:分为数据缓存和指令缓存;内置;成本最高,对CPU的性能影响最大;通常在32KB-256KB之间
- L2 Cache:分内置和外置两种,后者性能低一些;通常在512KB-8MB之间
- L3 Cache:多为外置,在游戏和服务器领域有效;但对很多应用来说,总线改善比设置L3更加有利于提升系统性能
主存储器
- 主存储器(简称内存或主存)是计算机系统中一个主要部件,用于保存进程运行时的程序和数据,也称可执行存储器。数据能够从主存储器读取并将它们装入到寄存器中,或者从寄存器存入到主存储器。
磁盘缓存
- 由于目前磁盘的 I/O 速度远低于对主存的访问速度,因此将频繁使用的一部分磁盘数据和信息,暂时存放在磁盘缓存中,可减少访问磁盘的次数。
磁盘
- 大容量存储设备
- 断电数据保留
可移动介质
- 便携式存储设备
2 程序的装入和链接
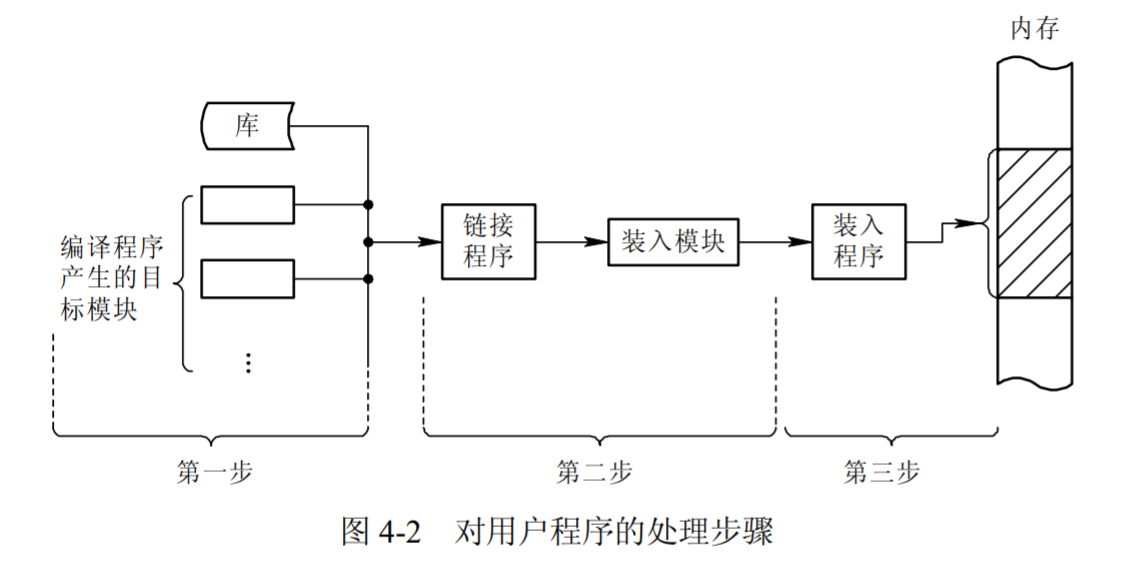
程序执行的步骤
- 首先是要编译,由编译程序(Compiler)将用户源代码编译成若干个目标模块(Object Module);
- 其次是链接,由链接程序(Linker)将编译后形成的一组目标模块,以及它们所需要的库函数链接在一起,形成一个完整的装入模块(Load Module);
- 最后是装入,由装入程序(Loader)将装入模块装入内存。然后执行
2.1 装入
逻辑地址(相对地址)
- 从0开始编号,在编译生成可执行文件的时候确定。包括以下两种形式:
- 一维逻辑地址(地址)
- 二维逻辑地址(段号:段内地址)
物理地址(绝对地址)
- 程序执行所使用的主存地址空间。处理器执行指令时按照物理地址进行
地址转换(重定位)
- 把逻辑地址转换成物理地址。包括两种方式:
- 静态重定位:在程序装入内存时进行地址转换。由装入程序执行,早期小型OS使用
- 动态重定位:在CPU执行程序时进行地址转换。从效率出发,依赖硬件地址转换机构
分类
- 根据地址转换的方式,可以将程序的装入分为三种方式。
- 绝对装入方式。在编译时,如果知道程序将驻留在内存的什么位置,那么,编译程序将产生绝对地址的目标代码。绝对装入程序按照装入模块中的地址,将程序和数据装入内存。装入模块被装入内存后,由于程序中的逻辑地址与实际内存地址完全相同,故不须对程序和数据的地址进行修改。程序中所使用的绝对地址,既可在编译或汇编时给出,也可由程序员直接赋予。
- 静态重定位装入方式。在装入时对目标程序中指令和数据的修改过程称为重定位。又因为地址变换通常是在装入时一次完成的,以后不再改变,故称为静态重定位。
- 动态重定位装入方式。动态运行时的装入程序在把装入模块装入内存后,并不立即把装入模块中的相对地址转换为绝对地址,而是把这种地址转换推迟到程序真正要执行时才进行。因此,装入内存后的所有地址都仍是相对地址。需要一个重定位寄存器的支持。
2.2 链接
编译系统
- 以下是一个 hello.c 程序:
1 |
|
- 在 Unix 系统上,由编译器把源文件转换为目标文件。
1 | gcc -o hello hello.c |

- 预处理阶段:处理以 # 开头的预处理命令;
- 编译阶段:翻译成汇编文件;
- 汇编阶段:将汇编文件翻译成可重定位目标文件;
- 链接阶段:将可重定位目标文件和printf.o 等单独预编译好的目标文件进行合并,得到最终的可执行目标文件。
目标文件
- 可执行目标文件:可以直接在内存中执行;
- 可重定位目标文件:可与其它可重定位目标文件在链接阶段合并,创建一个可执行目标文件;
- 共享目标文件:这是一种特殊的可重定位目标文件,可以在运行时被动态加载进内存并链接;
分类
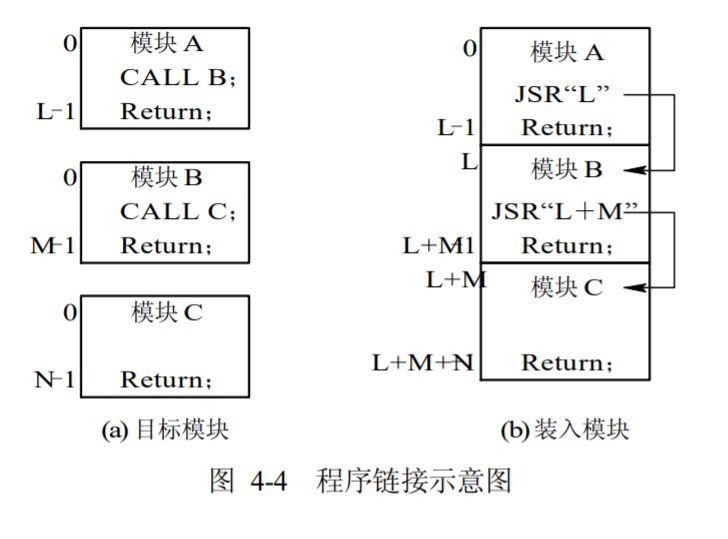
- 源程序经过编译后,可得到一组目标模块,再利用链接程序将这组目标模块链接,形成装入模块。根据链接时间的不同,可把链接分成如下三种:
- 静态链接。在程序运行之前,先将各目标模块及它们所需的库函数,链接成一个完整的装配模块,以后不再拆开。我们把这种事先进行链接的方式称为静态链接方式。
- 装入时动态链接。这是指将用户源程序编译后所得到的一组目标模块,在装入内存时,采用边装入边链接的链接方式。
- 运行时动态链接。这是指对某些目标模块的链接,是在程序执行中需要该(目标)模块时,才对它进行的链接。
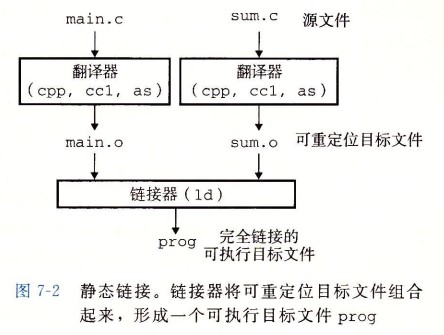
静态链接
- 静态链接器以一组可重定位目标文件为输入,生成一个完全链接的可执行目标文件作为输出。链接器主要完成以下两个任务:
- 符号解析:符号解析的目的是将每个符号引用与一个符号定义关联起来。每个符号对应于一个函数、一个全局变量或一个静态变量。
- 重定位:链接器通过把每个符号定义与一个内存位置关联起来。然后修改所有对这些符号的引用,使得它们指向这个内存位置。
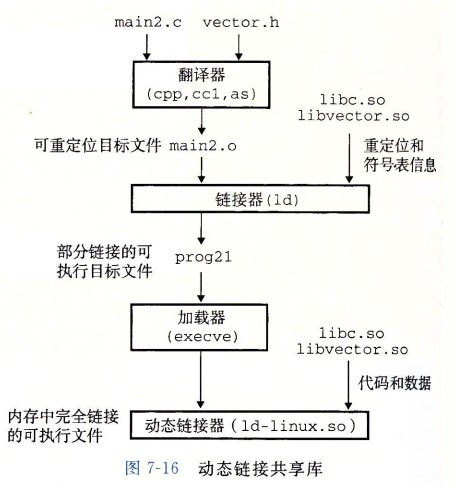
动态链接
静态库有以下两个问题:
- 当静态库更新时那么整个程序都要重新进行链接;
- 对于 printf 这种标准函数库,如果每个程序都要有代码,这会极大浪费资源。
共享库是为了解决静态库的这两个问题而设计的,在 Linux 系统中通常用 .so 后缀来表示,Windows 系统上它们被称为dll。它具有以下特点:
- 在给定的文件系统中一个库只有一个文件,所有引用该库的可执行目标文件都共享这个文件,它不会被复制到引用它的可执行文件中;
- 在内存中,一个共享库的字节码(已编译程序的机器代码)的一个副本可以被不同的正在运行的进程共享。
本博客所有文章除特别声明外,均采用 CC BY-NC-SA 4.0 许可协议。转载请注明来源 Estom的博客!
相关推荐

2021-12-24
locate
locate比 find 好用的文件查找工具 补充说明locate 让使用者可以很快速的搜寻档案系统内是否有指定的档案。其方法是先建立一个包括系统内所有档案名称及路径的数据库,之后当寻找时就只需查询这个数据库,而不必实际深入档案系统之中了。在一般的 distribution 之中,数据库的建立都被放在 crontab 中自动执行。 locate命令可以在搜寻数据库时快速找到档案,数据库由updatedb程序来更新,updatedb是由cron daemon周期性建立的,locate命令在搜寻数据库时比由整个由硬盘资料来搜寻资料来得快,但较差劲的是locate所找到的档案若是最近才建立或 刚更名的,可能会找不到,在内定值中,updatedb每天会跑一次,可以由修改crontab来更新设定值。(etc/crontab) locate指定用在搜寻符合条件的档案,它会去储存档案与目录名称的数据库内,寻找合乎范本样式条件的档案或目录录,可以使用特殊字元(如”” 或”?”等)来指定范本样式,如指定范本为kcpaner, locate 会找出所有起始字串为kcpa且结尾为ner的档案...

2021-12-24
readelf
readelf用于显示elf格式文件的信息 补充说明readelf命令 用来显示一个或者多个elf格式的目标文件的信息,可以通过它的选项来控制显示哪些信息。这里的elf-file(s)就表示那些被检查的文件。可以支持32位,64位的elf格式文件,也支持包含elf文件的文档(这里一般指的是使用ar命令将一些elf文件打包之后生成的例如lib*.a之类的“静态库”文件)。 这个程序和objdump提供的功能类似,但是它显示的信息更为具体,并且它不依赖BFD库(BFD库是一个GNU项目,它的目标就是希望通过一种统一的接口来处理不同的目标文件),所以即使BFD库有什么bug存在的话也不会影响到readelf程序。 运行readelf的时候,除了-v和-H之外,其它的选项必须有一个被指定。 ELF文件类型 种类型的ELF文件: 可重定位文件:用户和其他目标文件一起创建可执行文件或者共享目标文件,例如lib*.a文件。 可执行文件:用于生成进程映像,载入内存执行,例如编译好的可执行文件a.out。 共享目标文件:用于和其他共享目标文件或者可重定位文件一起生成elf目标文件或者...

2021-12-24
perl
perlperl语言解释器 补充说明perl命令 是perl语言解释器,负责解释执行perl语言程序。 语法1perl(选项)(参数) 选项1234-w:输出有用的警告信息;-U:允许不安全的操作;-c:仅检查文件的语法;-d:在调试下运行脚本程序。 参数文件:要运行的perl脚本程序。
2021-03-09
13 UML笔记之构件图和部署图
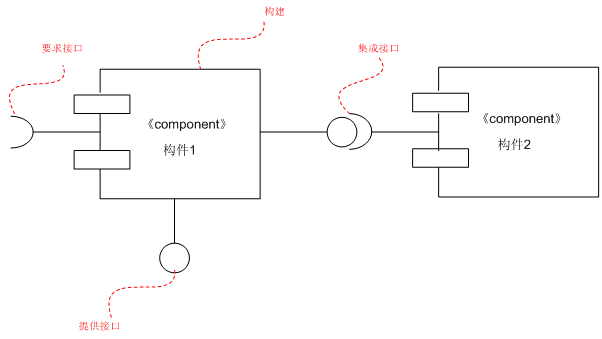
UML构件图与部署图 定义 为了描述系统实现方面的信息,使系统具有可重用性和可操作性的目的,构件图和部署图来表示实现单元。用来描述系统的文件构成,软件运行环境和硬件构成的两种图形—构件图和部署图。主要用来描述系统中能用眼睛看到的那一部分。 构件图 构件图定义 构件图是用来表示系统中构件与构件之间、构建内部结构的关系图 构件之间的依赖关系:与类图中类间依赖关系相同,都是使用虚线箭头表示 构件和接口之间的依赖关系:一个构件使用了其他元素的接口,依赖关系可以用箭头的虚线表示,箭头指向接口符号 构件图要素 构件、接口 构件图示例 构件定义 将系统中可重用的模块封装为具有可替代性的物理单元,称为构件。构件表示的是系统内预先定义好访问接口的可以再利用的软件部件。 构件的特征: 1、代码特征:包含和封装了实现系统功能的类、其他元素的实现代码以及某些构成系统状态的实例对象 2、身份特征:构件拥有身份和状态,用于定位在其上的物理对象 构件的表示: 接口定义 构件之间通过接口连接起来。接口定义了操作调用的方法,并且不包含操作的具体实现。 提供接口:构件提供给外部的接口 要求接口:构件访问...

2021-12-24
last
last列出目前与过去登入系统的用户相关信息 补充说明last命令 用于显示用户最近登录信息。单独执行last命令,它会读取/var/log/wtmp的文件,并把该给文件的内容记录的登入系统的用户名单全部显示出来。 语法1last(选项)(参数) 选项123456-a:把从何处登入系统的主机名称或ip地址,显示在最后一行;-d:将IP地址转换成主机名称;-f <记录文件>:指定记录文件。-n <显示列数>或-<显示列数>:设置列出名单的显示列数;-R:不显示登入系统的主机名称或IP地址;-x:显示系统关机,重新开机,以及执行等级的改变等信息。 参数 用户名:显示用户登录列表; 终端:显示从指定终端的登录列表。 实例last命令用了显示用户登录情况,以下是直接显示固定行数的记录: 1234567891011last -10root pts/0 221.6.45.34 Tue Dec 17 09:40 still logged inroot pts/0 221.6.45.34 ...
2021-12-24
alias
alias定义或显示别名。 概要1alias [-p] [name[=value] ...] 主要用途 简化较长的命令。 定义一个或多个别名。 修改一个或多个已定义别名的值。 显示一个或多个已定义别名。 显示全部已定义的别名。 选项1-p:显示全部已定义的别名。 参数name(可选):指定要(定义、修改、显示)的别名。 value(可选):别名的值。 返回值alias返回true除非您要显示的别名未定义。 例子1234567891011# 显示全部已定义的别名aliasalias -p# 显示已定义的别名(假设当前环境存在以下别名)alias lsalias ls grep# 定义或修改别名的值alias ls='ls --color=auto'alias ls='ls --color=never' grep='grep --color=never' 知识点直接在shell里设定的命令别名,在终端关闭或者系统重新启动后都会失效,如何才能永久有效呢? 使用编辑器打开~/.bashrc,在文件中加入别名设置,如:al...